ARTIST ARD

-
Arduino Uno / Breadboard
-
2 5V Stepper Motors
-
ULN2803 Darlington Driver
-
12 Male-male jumpers
-
Male pin header
-
2 3xAA Battery holder
-
470 uF 25V capacitor
-
SPDT slide switch
-
6 AA Batteries
Purpose: Explore the creativity of artificial intelligence through arduino
Team: Tsai Ying Sabrina Chuang, Reena Kim, Sarah Diaz
Time: 10 Weeks
Tool: Arduino Uno, Stepper Motor, Led, Microphone Senso
*Design / Physical Computing / Laser Cutting / 3D printing
BACKGROUND
-
Arduino
-
Arduino’s hand (that will hold a marker)
-
Movement mechanism: using 3D printing/laser cutting
-
Movement: coding with arduino
-
Microphone sensor (to detect sound)
-
Drawing surface

HANDS ON BUILDING
1. 3D print out some materials like the wheel and the body of the robot.
2. Connecting Arduino to the board and start physical computing it.
3. Testing the stepper motor with the wheels
4. Testing led light
5. Testing the microphone sensor
6. Fix and adjust
As an artist I am always curious about whether artificial intelligence can create artwork. Therefore to explore more about this topic me and my colleagues start a project with arduino. We create a robot with arduino that can “draw” what it “hears”. We want to explore artificial intelligence as its simplest form. Not only do we want to see whether robots can think creatively, we also want to explore the umwelt of robots to better understand artificial intelligence. We were excited about exploring artificial intelligence's way of “thinking”.
MATERIAL
EXECUTION
BRAINSTORMING
We wanted to make an arduino robot that draws on an empty piece of paper depending on sound level. We will attach markers on the robot and when it moves based on the sound input received the robot will create a drawing as an out.
Project Overview















TESTING


First Testing: We test our robot with a whistle. We have it start moving straight when high frequency sound is received.
Second Testing: We design to make the robot go straight when it hears and high pitch sound like whistle and turn direction when there is no sound.
Third Testing: We test it with music. The robot will turn direction as the pitch and volume change. The led light will also change based on the music. The robot can turn right and left and move forward and backward depending on different levels of frequency of sound.
Here, we are testing our wheel and led light. The wheel so far can only go straight and led will turn on when the wheel is working.
Here we are testing the microphone sensor, wheel and led light. As microphone speaker receive sound it will cause wheels start spinning and light turn on.
FINAL RESULT
We called our robot Artist Ard.
It can take the environment sound as input and give a corresponding output.
When it hears a pitch sound in the environment, It will go straight and the led light on it will turn on, otherwise it will rotate and turn direction. Through this project we argue that artificial intelligence thinks based on responding to their umwelt just like humans. However, unlike human artificial intelligence, it receives an input and responds with a constant output. This is an interesting project to help us think more about human conscious and artificial intelligence.

Artist Ard is leaving its trace mark.
Continue working on its painting


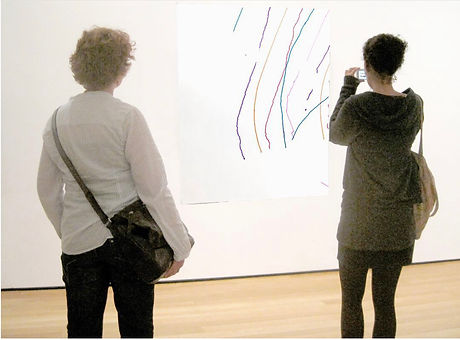
To promote our robot, we create an instagram page for it: @artistarduino.
We also create images of mock exhibition for Artist Ard's artworks.